Introduzione
Questo documento descrive l'uso di TITAN, la sua configurazione e la risoluzione dei problemi nelle distribuzioni CURWB.
Nozioni di base su TITAN
TITAN è una funzione critica che offre alta disponibilità con ridondanza hardware nelle installazioni CURWB. Può essere configurato attraverso varie funzioni della parte fissa della rete di fluidità. Le applicazioni più comuni sono l'abilitazione di TITAN su Core Network Global Gateway, Local Mesh End Gateway e Onboard Vehicle Radio. Funziona sia sulle reti di livello 2 che su quelle di livello 3.
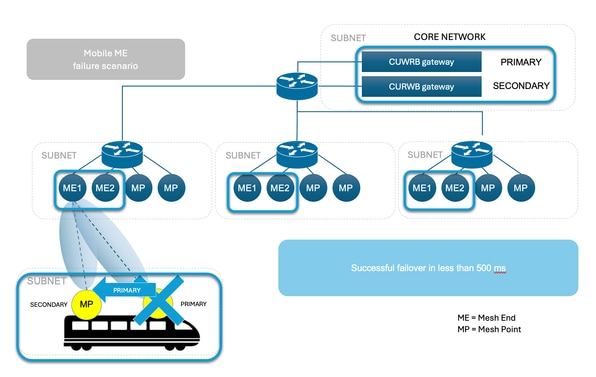
Se abilitata, TITAN fornisce il failover rapido da un dispositivo primario a un dispositivo secondario in meno di 500 millisecondi. Il dispositivo secondario riprende immediatamente le comunicazioni CURWB MPLS.
L'esempio riportato di seguito mostra il failover di TITAN in tutte e tre le condizioni.
- Core Network Global Gateway,
- Local Mesh End Gateway e
- Radio di bordo del veicolo
Come funziona TITAN?
Per comprendere appieno il concetto di Titano, è essenziale acquisire familiarità con Autotap. È un meccanismo di prevenzione del loop di rete che consente ai dispositivi CUWRB di rilevare le connessioni e consentire solo un percorso di entrata/uscita dedicato da e verso l'estremità della rete o il nucleo della rete.
Le radio con la stessa passphrase, collegate allo stesso switch di rete nello stesso dominio di trasmissione, funzionano come un'unica unità con più antenne.
Il protocollo CURWB Mesh rileva le connessioni cablate tra le radio, con route create automaticamente. Il risultato è simile a un singolo access point con più interfacce wireless.
La funzionalità AutoTap impedisce che si verifichino loop di rete in tali configurazioni. Solo la radio selezionata come principale (ID Mesh numerico più basso) in un gruppo fisicamente connesso pubblica le informazioni sull'indirizzo MAC. Il traffico proviene solo dalla radio selezionata come radio primaria del gruppo connesso.
Infrastruttura fissa
L'utente imposta due unità Mesh End con la stessa configurazione e si connette allo stesso switch. Questi dispositivi condividono le informazioni per selezionare l'unità primaria e l'altra unità è in standby. Quando si verifica un guasto, l'unità di Standby prende il controllo in 500 ms e ricollega tutti i punti mesh al sistema. Per le reti fisse, TITAN può essere abilitato solo sulle unità Mesh End e i punti stabiliscono automaticamente una connessione con l'estremità che ha preso il sopravvento.
Veicoli per la mobilità
Il processo è lo stesso che in una rete fissa, le unità devono trovarsi sullo stesso switch con la stessa configurazione. L'algoritmo imposta uno come unità primaria e l'altro come unità secondaria. In caso di guasto del sistema primario, l'unità secondaria subentra in 500 ms e stabilisce una connessione con l'unità a terra chiusa. L'unica differenza con la mobilità è che TITAN può essere abilitato sulle unità Mesh Point. In questo caso, la funzione Fluidità sostituisce la modalità operativa della radio.
Radio a terra
Quando la radio non è in grado di comunicare con la rete backbone, il sistema forza il veicolo/i a collegarsi al più vicino bordo pista come risposta immediata al guasto. Si tratta dello stesso processo utilizzato per le reti fisse, ma con la possibilità di più di una pista di attesa attiva. Sul sistema a terra, il backup non è una radio in modalità standby ma una radio pienamente operativa e attiva in grado di coprire il guasto.
Gateway connesso alla rete aziendale
Proprio come Mesh Termina su una rete fissa, i gateway (FM1000 e FM1000) lavorano insieme per selezionare un server primario e il backup assume il controllo in caso di guasto.
Elezione principale
Tutte le unità CURWB collegate allo stesso dominio di trasmissione cablato e configurate con la stessa passphrase eseguono un processo di selezione primaria distribuita ogni pochi secondi. L'unità primaria costituisce un punto limite della rete CURWB MPLS, ovvero un dispositivo in cui il traffico utente può entrare o uscire dalla rete mesh. Le unità secondarie fungono da punti di inoltro MPLS. Per ogni elemento adiacente, l'algoritmo calcola un valore di precedenza in base al ruolo dell'unità (punto mesh o punto mesh) e al relativo ID mesh. Alle estremità della rete viene assegnata una priorità più alta rispetto ai punti della rete e, tra la stessa priorità, viene preferita l'unità con l'ID della rete più basso. Il meccanismo di elezione si basa su un protocollo di segnalazione dedicato che viene costantemente eseguito nella rete e garantisce che tutte le unità scelgano lo stesso Primario.
Mesh End Failover
Durante il normale funzionamento, la rete primaria e secondaria termina continuamente per comunicare tra loro sul loro stato e per scambiare informazioni sulla raggiungibilità della rete. In particolare, il database primario invia periodicamente aggiornamenti al database secondario per quanto riguarda la tabella di inoltro interna e le route multicast.
Configurazione
Nella configurazione di base di TITAN, per un'implementazione sono necessari due gateway (Mesh End), uno primario e l'altro secondario.
Sia l'hardware principale che quello secondario devono avere queste configurazioni TITAN.
configurazione dello stato di fastfail mpls abilitata
configurare mpls fastfail timeout 150
config mpls unicast-flood abilitato
config mpls arp-unicast disabilitato
config spanning-tree link-guard 40
configurazione arp gratuitous abilitata
configura ritardo arp gratuito 150
Nelle configurazioni di layer 3, se è necessario disporre di HA su ciascuna estremità della rete, sono necessarie due estremità della rete su cui eseguire la precedente configurazione TITAN.
Durante la configurazione di TITAN sulla radio del veicolo, prima il veicolo deve avere 2 radio su di esso. In caso di guasto sul sistema primario, il sistema secondario assume il controllo della comunicazione. In questo scenario, le radio del veicolo e l'estremità della rete di fluidità devono avere la configurazione TITAN.
Scenario di test
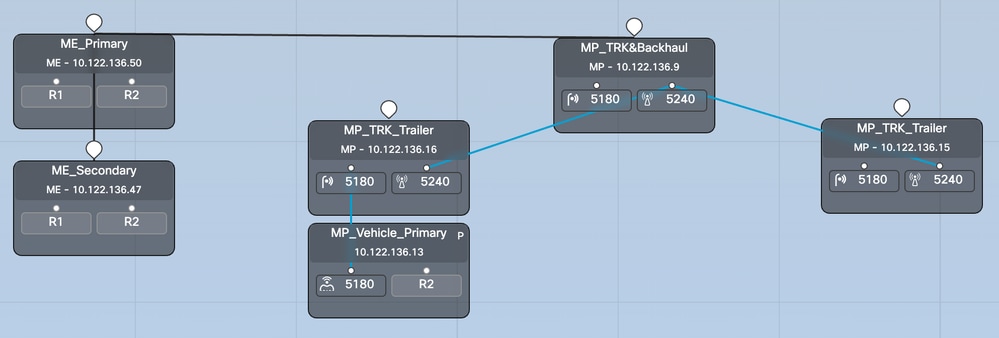
L'attuale topologia di rete include sette radio. In questa configurazione, le radio Mesh End hanno le loro interfacce wireless disattivate. Il loro ruolo si limita a fungere da gateway, piuttosto che a funzionare come parte del sistema radio a terra. All'unità principale Mesh End viene assegnato l'indirizzo IP 10.122.136.50 e all'unità secondaria l'indirizzo IP 10.122.136.47.
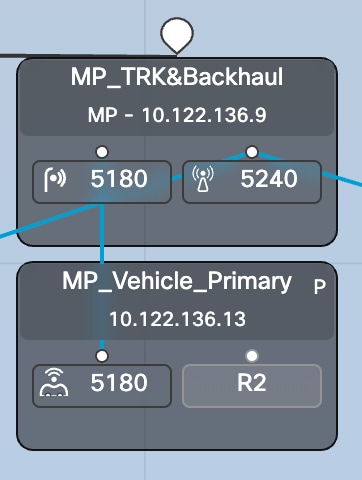
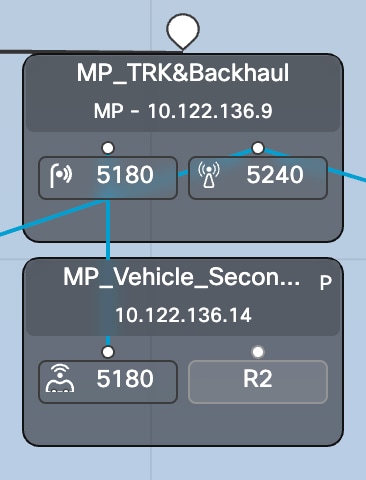
Abbiamo 3 radio a terra (10.122.136.9, 10.122.136.16 e 10.122.136.15). La radio a terra con indirizzo IP 10.122.136.9 è collegata tramite cavi all'infrastruttura di rete principale. Questa radio centrale estende anche un collegamento backhaul a una coppia di radio rimorchio con IP 10.122.136.15 e 10.122.136.16. Questi collegamenti backhaul di infrastruttura fissa funzionano sulla banda di frequenza 5240 MHz. Collettivamente, le tre radio forniscono copertura wireless al veicolo mobile che opera su una frequenza di 5180 MHz con l'indirizzo IP 10.122.136.13).
Il veicolo mobile è dotato di due radio con indirizzo IP 10.122.136.13 come primario e 10.122.136.14 come secondario. Entrambe le radio sono interconnesse tramite un unico interruttore. La radio secondaria non è visualizzata.
Mesh End Failover
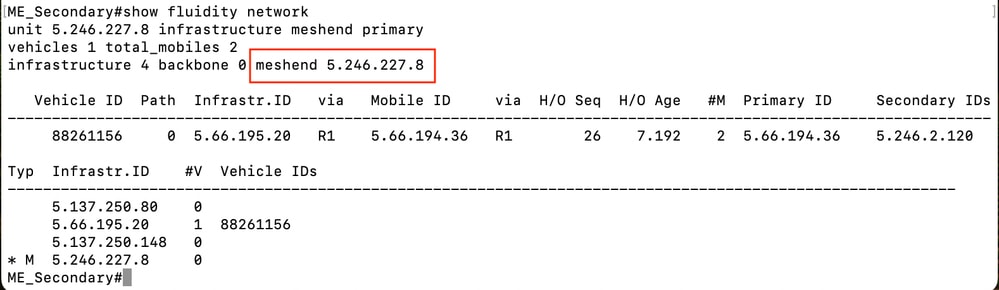
Passaggio 1: Entrambe le estremità della rete primaria e secondaria sono collegate alla rete e sono attive. Vediamo la radio con l'ID Mesh inferiore che agisce come estremità della rete.
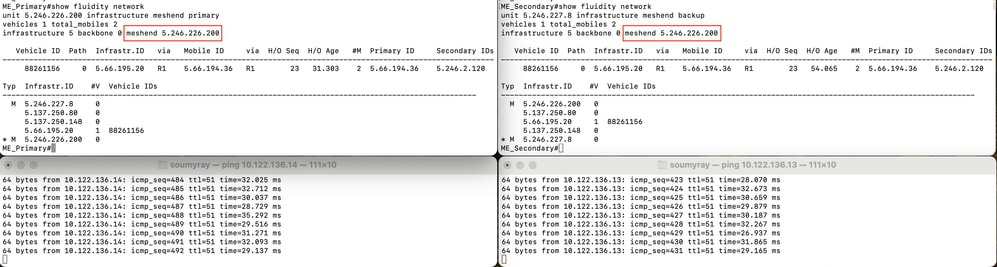
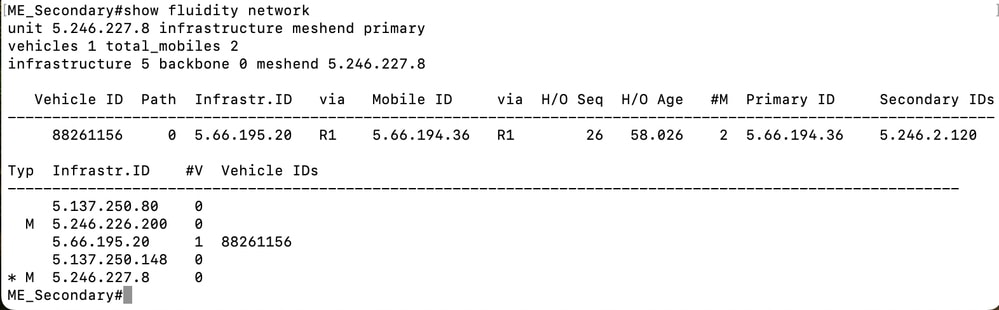
Passaggio 2: quando la rete primaria passa, l'estremità secondaria della rete subentra e agisce da estremità della rete per l'intera rete. Si noti che l'estremità principale della mesh non riuscita non è più presente nell'elenco delle radio dell'infrastruttura.
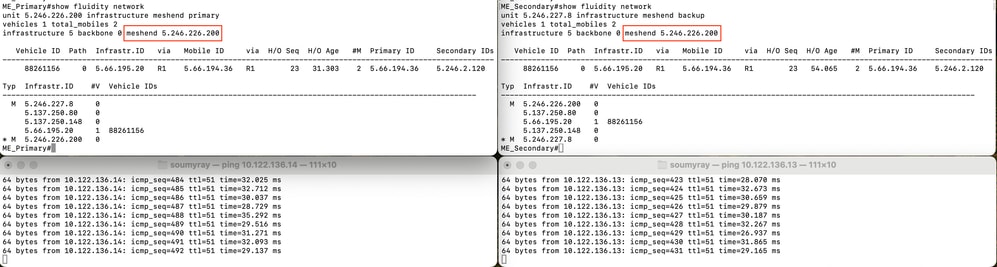
Passaggio 3: La radio primaria guasta è ora tornata operativa. Tuttavia, attende il ritardo relativo alla priorità per conoscere la topologia di rete
Passaggio 4: Una volta raggiunto il timer di interruzione per diritti di priorità, l'ID Mesh 5.246.226.200 assume il ruolo di primario e radio con l'ID mesh 5.246.227.8 diventa di nuovo secondario.
Test di failover sulla radio del veicolo
In questa rete di laboratorio, abbiamo una rete di fluidità con un veicolo collegato a terra. Il veicolo ha due radio con IP 10.122.136.13 - Mesh ID 5.66.194.36 (P) e 10.122.136.14 - Mesh ID 5.246.2.120 (S).
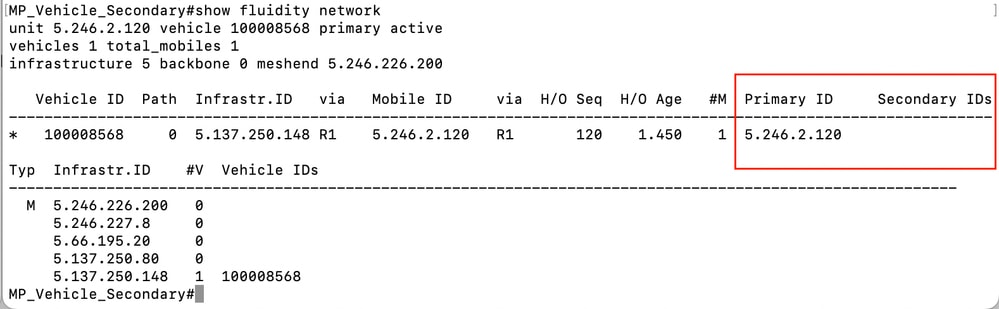
Fase 1: entrambe le radio del veicolo principale e secondario sono in linea. Possiamo vedere la radio con un ID Mesh inferiore che agisce come radio primaria e l'altra come secondaria. In base alla qualità wireless, sia la radio primaria che quella secondaria possono comunicare con la radio a terra. Ma tutte le comunicazioni a valle verso la rete a bordo passano sempre attraverso la radio primaria. Con TITAN la radio secondaria del veicolo diventa primaria durante un guasto entro 500 ms.
In questa schermata, il tunnel MPLS può essere visto dall'estremità della rete alle radio del veicolo.

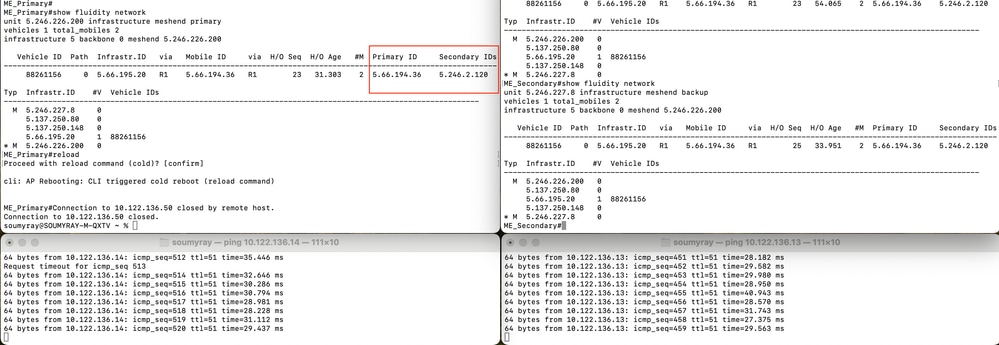
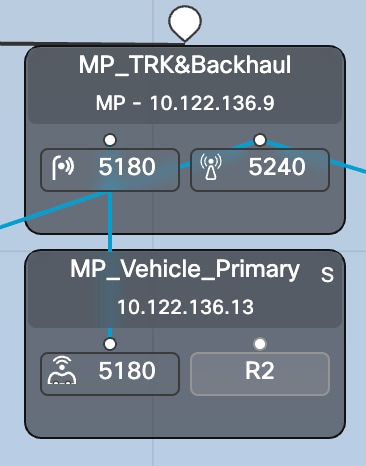
Fase 2: Quando si chiude la radio primaria 10.122.136.13, viene eseguito il failover sulla radio secondaria e ora 10.122.136.14 diventa la radio primaria.
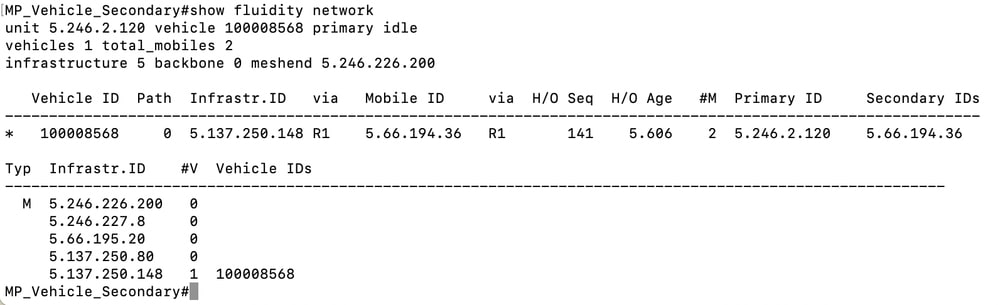
Passaggio 3: La radio principale di bordo non funzionante sul veicolo è riaccesa e funzionante. Tuttavia, anche se questa radio si connette alla rete, attende il ritardo della prelazione e non partecipa attivamente alla rete di fluidità.
Come si vede in questa schermata, 5.66.194.36 è tornato online ma ancora, sta agendo come secondario durante il ritardo di prelazione e 5.246.2.120 sta ancora gestendo la comunicazione. Il tunnel MPLS mostra anche che la versione 5.246.2.120 sta comunicando con la radio a terra.

Risoluzione dei problemi di TITAN
- Durante la configurazione di TITAN, tutte le configurazioni devono essere identiche su tutte le radio richieste.
- In base alle dimensioni della distribuzione, potrebbe essere necessario aumentare il ritardo per l'interruzione per diritti di priorità. In questo modo, quando l'unità guasta diventa operativa, non assume il ruolo troppo presto prima di imparare la topologia.
- Configurare il timeout di errore rapido su un valore troppo piccolo può creare una rete instabile. Un valore di 150 ms può essere utilizzato nella maggior parte delle distribuzioni.
 Feedback
Feedback