Cisco 라우터의 연결 및 채널화된 SONET 인터페이스 이해
목차
소개
SONET는 ANSI(American National Institute Standard) 사양입니다.SONET는 T-캐리어 사양을 기반으로 하는 STS(동기식 전송 신호) 프레이밍을 사용합니다.Telcordia(Belcore) Publication GR-253 표준은 SONET 속도 및 형식을 정의하며 3.2.3 섹션에 연결을 포함합니다.
SDH(Synchronous Digital Hierarchy)는 국제 사회가 이러한 새로운 표준화를 인식한 이후 도입되었습니다.ITU-Telecommunications(ITU-T) Standardization Sector, 이전의 CCITT에 의해 제어되는 SDH는 STM(Synchronous Transport Mode) 프레이밍을 사용하며, 이 구조를 E-carrier 또는 CEPT 환경에 기반합니다.ITU-T 및 CCITT 권장 사항은 G.708 및 G.709에서 요율과 형식을 정의합니다.
이는 이더넷 표준의 기반인 IEEE 802.3 표준과 같습니다.모든 것이 두 형식 간에 동일한 방식으로 작동합니다.이 두 프레이밍 형식은 STS-3 및 STM-1 레벨에서 하나의 기본 프레이밍 구조로 함께 제공되며 이 문서의 SONET 용어로 참조됩니다.SDH는 다른 약어 집합을 사용하지만 이 문서의 목적을 위해 SDH를 SONET의 국제 버전으로 간주합니다.
사전 요구 사항
요구 사항
이 문서에 대한 특정 요건이 없습니다.
사용되는 구성 요소
이 문서는 특정 소프트웨어 및 하드웨어 버전으로 한정되지 않습니다.
표기 규칙
문서 규칙에 대한 자세한 내용은 Cisco 기술 팁 표기 규칙을 참고하십시오.
SONET/SDH 프레이밍 개요
SONET 프레임은 프레임에 바이트 인터리브된 여러 개의 저속 STS 스트림으로 구성됩니다.예를 들어, STS-3 프레임이 어떻게 구축되는지 살펴보겠습니다.
-
프레임의 최대 268번째 열은 첫 번째 STS-1에서 파생됩니다.
-
2번째, 5번째, 8번째 등 STS-3 프레임의 최대 269번째 열은 두 번째 STS-1에서 파생됩니다.
-
STS-3 프레임의 최대 270번째 열은 세 번째 STS-1에서 파생됩니다.
다음은 바이트 인터리빙 후 복합 STS-1의 바이트 스트림의 TOH(Transport Overhead) 열이 STS-3 프레임의 시작 부분에 정렬되는 방법을 보여 주는 그림입니다.
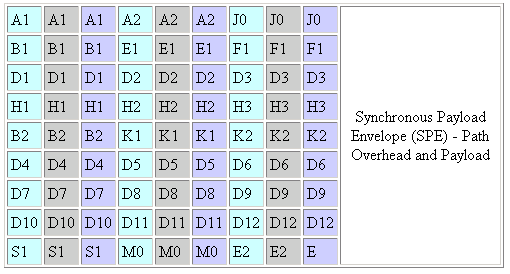
이 문서는 SONET의 세 가지 오버헤드 유형을 참조합니다.또한 4번째 TOH가 있는데, 이것은 이 두 개의 윗머리를 포함하는데 사용됩니다.이 두 가지는 LOH(Line Overhead) 및 SOH(Section Overhead)입니다. IP와 다소 다르게 처리되면 인접한 SONET 디바이스가 서로 통신하는 데 사용되는 프로토콜이 포함됩니다.이 정보는 SONET 디바이스에서 다음 SONET 디바이스로 전달될 때 변경할 수 있습니다.
POH(Path Overhead)는 회로가 모든 SONET 디바이스를 통과하는 동안 회로가 변경 없이 종료되는 지점부터 회선이 시작되는 지점까지의 동일한 특성을 전달하는 통신을 제공합니다.이 경로 오버헤드는 데이터와 결합되어 SPE(Synchronous Payload Envelope)라고 합니다.
연결(Unchannelized) SONET 프레임
SONET의 구조는 채널화된 구조로 처음 개발되었습니다.STS-1, STS-1, STS-1, STS-3, ST-3 등 28개 VT.STS 프레임 내의 모든 1바이트는 STS를 구성하는 데 도움이 되는 기본 VT와 직접적인 관계를 갖습니다.대역폭에 대한 요구가 aVT-1의 기본 대역폭을 지나 증가함에 따라 이 채널을 제거하기 위한 새로운 요구 사항이 마련되었습니다.
STS 속도의 하위 문자 "c"는 "concatenated"를 의미하며, 인터페이스 하드웨어가 변경되지 않았음을 나타냅니다.연결 인터페이스의 예로는 STS-3c 및 STS-12c가 있습니다.Cisco 라우터의 대부분의 SONET 인터페이스는 연결됩니다.
보시다시피, 채널화된 STS-3에는 각각 POH를 포함하는 자체 SPE와 STS-1 회로 내에서 전송되는 데이터가 포함된 3개의 개별 STS-1 회로가 있습니다.STS-3c에는 단일 동기 페이로드 포락선 및 POH의 단일 열만 포함되어 있으며, 이 열은 일반적으로 첫 번째 STS-1이 되는 위치에 항상 나타납니다. STS-3c를 세 개의 STS-1 프레임으로 붙여넣어 더 큰 단일 프레임을 만들 수 있습니다.SONET 장비는 이러한 인터페이스를 단일 개체로 취급합니다.
연결된 SONET 프레임과 함께 사용되는 오버헤드 바이트의 그림입니다.
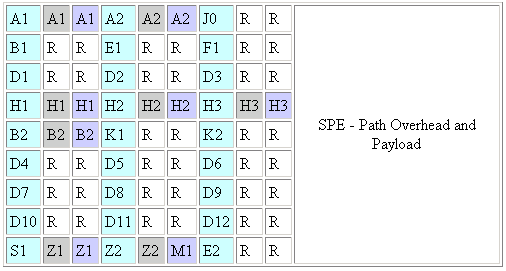
전체 프레임에 대해 여러 SONET 오버헤드 기능을 한 번 수행할 수 있습니다.연결된 프레임의 이 다이어그램에서 R은 사용되지 않은 바이트 위치를 나타냅니다.사용되지 않은 이러한 바이트는 페이로드에 사용할 수 없으며, 공간 보유자는 무시됩니다.예를 들어, 섹션 오버헤드와 APS(Automatic Protection Switching) 상태의 B1 바이트를 통한 비트 인터리브 패리티 검사, STS-3의 첫 번째 STS-1을 제외하고 라인 오버헤드에서 K1 및 K2 APS 바이트를 통한 이벤트 보고는 정의되지 않고 무시됩니다.
채널화된 SONET 프레임
연결된 인터페이스와 마찬가지로, 채널화된 SONET 인터페이스는 저속 STS 스트림으로 구성됩니다.그러나 채널화된 SONET 인터페이스는 고유한 페이로드 포인터로 스트림을 독립적인 프레임으로 유지합니다.이 프레임은 전송하기 전에 멀티플렉싱되어 물리적 파이버의 전달 용량을 늘릴 수 있습니다.이 프로세스는 24 DS0s(Digital Signal Level 0) 채널을 DS1 또는 28 DS1 스트림을 DS3 로 멀티플렉싱하는 것과 유사합니다.
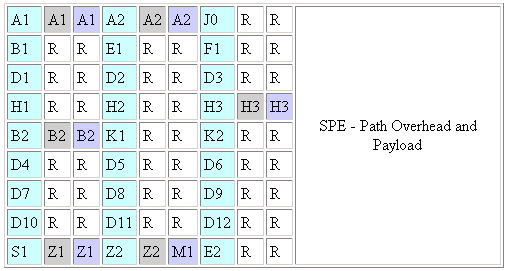
다음은 채널화된 SONET 프레임과 함께 사용되는 전송 오버헤드의 바이트 위치를 나타내는 그림입니다.R은 사용되지 않은 바이트 위치를 나타냅니다.
H1 및 H2 바이트(연결 표시기)
SONET 네트워크용 GR-253 표준은 라인 오버헤드 섹션에서 H1 및 H2 바이트를 사용하여 프레임이 채널화되었는지 여부를 나타냅니다.
STS-3c 예와 같은 연결 회로를 사용하면 열 2 및 5, 열 3 및 6의 연결 인터페이스는 H1 바이트에 1001XX11, H2 바이트에 111111 값을 사용합니다.GR-253은 첫 번째 복합 STS 스트림만 이러한 H1 및 H2 값을 실제로 사용하도록 지정합니다.다른 모든 스트림은 비트 7-16을 1로 설정하고 새 데이터 플래그 비트 1-4를 1001로 설정해야 합니다.
Channelized 인터페이스에서는 이러한 H1 및 H2 바이트를 사용하여 10비트 포인터를 형성합니다. 이는 SPE의 새 프레임이 각 해당 STS-1에 대해 시작되는 바이트 위치를 나타냅니다. 포인터는 0에서 782 사이의 값을 지원합니다. STS-1에는 SPE의 87개 열이 포함됩니다.프레임 783바이트를 제공하는 프레임의 9개 행을 곱합니다.그러면 SONET는 0부터 시작하는 이 바이트의 숫자를 지정합니다.
STS-3 또는 STS-3c에는 STS-1의 3배, 87의 3배 = 261열이 포함됩니다.그런 다음 이 숫자에 프레임 내의 9개 행을 곱하여 2349바이트를 제공합니다.그러나 H1/H2 포인터 필드는 10비트이며 최대 0~1023을 제공하여 SPE가 시작될 시작 위치를 식별합니다.이 문제를 해결하기 위해 SONET 인터페이스를 수신하면 값이 0~782 범위에 속할 때 첫 번째 STS 스트림의 포인터 필드에서 값이 3배 커집니다. 따라서 포인터 값은 1로, 포인터 값은 782로 2346으로 표시됩니다.따라서 최대 3바이트의 버퍼링을 통해 문제가 해결됩니다.
Channelized SONET 하드웨어
Cisco는 다음과 같은 채널화된 SONET 하드웨어를 제공합니다.
참고: 컨피그레이션 명령을 통해 변경할 수 없거나 연결된 하드웨어는 컨피그레이션 명령으로 변경할 수 없으며 지원 시 고정됩니다.또한 잘못된 일치를 탐지하거나 수신 신호의 프레이밍 유형을 나타내는 명령은 사용할 수 없습니다.SONET 테스트 장비를 사용하여 불일치를 탐지합니다.
 피드백
피드백