はじめに
このドキュメントでは、CURWBの導入におけるTITANの使用、設定、およびトラブルシューティングについて説明します。
TITANの基本
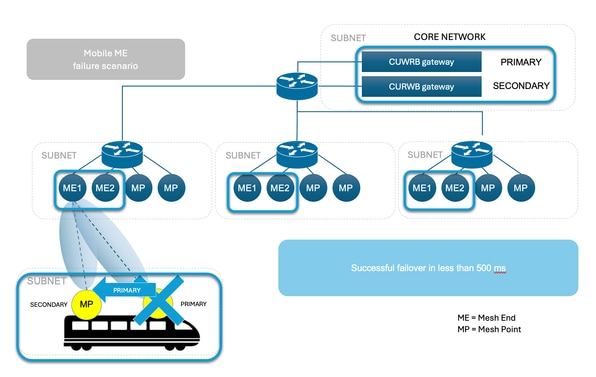
TITANは、CURWBの導入において、ハイアベイラビリティとハードウェア冗長性を提供する重要な機能です。流動性ネットワークの固定部分の様々な機能全体にわたって構成することができる。最も一般的なアプリケーションは、コアネットワークのグローバルゲートウェイ、ローカルメッシュエンドゲートウェイ、およびオンボード車両の無線でTITANを有効にすることです。レイヤ2とレイヤ3の両方のネットワークで動作する
TITANを有効にすると、プライマリデバイスからセカンダリデバイスへの高速フェールオーバーが500ミリ秒未満で実行されます。セカンダリデバイスは、CURWB MPLS通信をすぐに再開します。
ここに示す例では、3つすべての状況でのTITANフェールオーバーを示しています。
- コアネットワークグローバルゲートウェイ
- ローカルメッシュエンドゲートウェイ
- 車載無線
TITANの仕組み
Titanの概念を完全に理解するには、Autotapに慣れる必要があります。これは、CUWRBデバイスが接続を検出し、メッシュエンドまたはネットワークコアとの間の専用の入出力ルートのみを許可するネットワークループ防止メカニズムです。
同じパスフレーズを持つ無線は、同じブロードキャストドメイン上の同じネットワークスイッチに接続され、複数のアンテナを持つ単一のユニットとして機能します。
CURWB Mesh Protocolは、無線間の有線接続を検出し、ルートが自動的に構築されます。その結果、複数の無線インターフェイスを備えた単一のAPを持つようになります。
AutoTap機能は、このような構成でのネットワークループを防止します。物理的に接続されたグループ内でプライマリ(最小のメッシュID値)として選択された無線だけが、MACアドレス情報をパブリッシュします。トラフィックは、接続されたグループのプライマリ無線として選択された無線からのみ着信することが確認されます。
固定インフラストラクチャ
ユーザは、同じ設定を持つ2つのメッシュエンドユニットを設定し、同じスイッチに接続します。これらのデバイスは情報を共有してプライマリを選択し、もう一方のユニットはスタンバイ状態になります。障害が発生すると、スタンバイユニットが500ミリ秒で引き継ぎ、すべてのメッシュポイントがシステムに接続されます。固定ネットワークの場合、TITANはメッシュの終端ユニットでのみ有効になり、ポイントは自動的に引き継いだ終端との接続を確立します。
モバイル向け車両
このプロセスは固定ネットワークと同じで、ユニットは同じ設定の同じスイッチ上に存在する必要があります。アルゴリズムによって、一方がプライマリユニットとして設定され、もう一方がセカンダリユニットとして設定されます。プライマリに障害が発生した場合、セカンダリユニットが500ミリ秒で引き継ぎ、閉じた側のトラックユニットとの接続を確立します。モビリティとの唯一の違いは、TITANをメッシュポイント単位で有効にできることです。その場合、Fluidity機能が無線の動作モードに取って代わります。
トラックサイド無線
無線がバックボーンネットワークと通信できない場合、システムは障害に対する即時の応答として、車両を最も近いトラック側に強制的に接続します。これは固定ネットワークの場合と同じプロセスですが、複数のアクティブなスタンバイトラックサイドが存在する可能性があります。トラック側のシステムでは、バックアップはスタンバイモードの無線ではなく、障害に対処できる完全に動作可能なアクティブな無線です。
企業ネットワークに接続されたゲートウェイ
固定ネットワークでメッシュが終了するのと同様に、ゲートウェイ(FM1000およびFM10000)が連携してプライマリを選択し、バックアップが障害を引き継ぎます。
プライマリ選択
同じ有線ブロードキャストドメインに接続され、同じパスフレーズで設定されたすべてのCURWBユニットは、数秒ごとに分散プライマリ選出プロセスを実行します。プライマリユニットは、CURWB MPLSネットワークのエッジポイント、つまりユーザトラフィックがメッシュに出入りできるデバイスを構成します。セカンダリユニットは、MPLSリレーポイントとして機能します。各ネイバーについて、アルゴリズムはユニットのロール(メッシュ端またはメッシュ点)とそのメッシュIDに基づいて優先順位値を計算します。メッシュ端にはメッシュ点よりも高い優先順位が割り当てられ、同じ優先順位の中で最も低いメッシュIDを持つユニットが優先されます。選出メカニズムは、ネットワークで常時稼働する専用シグナリングプロトコルに依存し、すべてのユニットが同じプライマリを選出することを保証します。
メッシュ終了フェールオーバー
通常の動作中は、プライマリメッシュとセカンダリメッシュが継続的に終了し、相互にステータスについて通信し、ネットワーク到達可能性情報を交換します。特に、プライマリは内部フォワーディングテーブルとマルチキャストルートに関するアップデートをセカンダリに定期的に送信します。
コンフィギュレーション
基本的なTITAN設定セットアップでは、導入には2つのゲートウェイ(メッシュエンド)が必要です。1つはプライマリ、もう1つはセカンダリです。
ハードウェアのプライマリ部分とセカンダリ部分の両方に、これらのTITAN設定が必要です。
mpls fastfailステータスをイネーブルに設定する
mpls fastfailタイムアウト150の設定
config mpls unicast-flood enabled(オプション)
config mpls arp-unicast disabled(オプション)
スパニングツリーリンクガード40の設定
config arp gratuitousが有効
arp gratuitous delay 150の設定
レイヤ3設定では、各メッシュ端でHAが必要な場合、前のTITAN設定を実行する必要がある2つのメッシュ端が必要です。
車両の無線でTITANを設定する際には、まず車両に2つの無線を設定する必要があります。プライマリで障害が発生した場合、セカンダリが通信を引き継ぎます。このシナリオでは、車両の無線と流動性ネットワークのメッシュエンドにTITAN構成が必要です。
テスト シナリオ
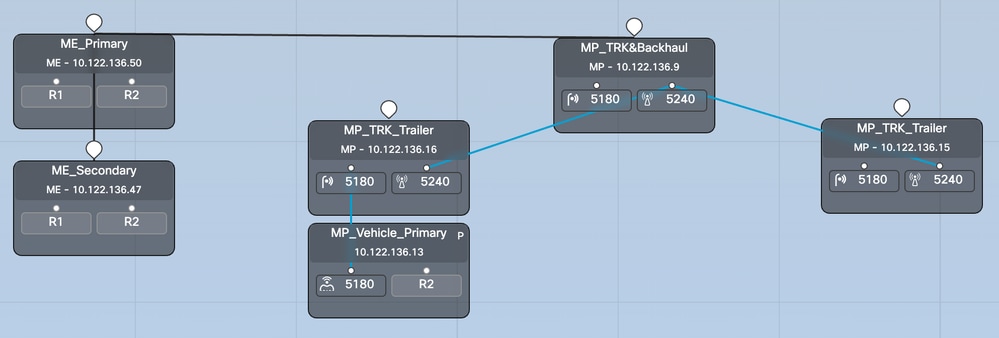
現在のネットワークトポロジには、7つの無線が含まれています。この設定では、メッシュエンド無線のワイヤレスインターフェイスが無効になります。このスイッチの役割は、トラックサイド無線システムの一部としてではなく、ゲートウェイとしての役割に限定されています。プライマリメッシュエンドユニットにはIPアドレス10.122.136.50が割り当てられ、セカンダリユニットにはIPアドレス10.122.136.47が割り当てられます。
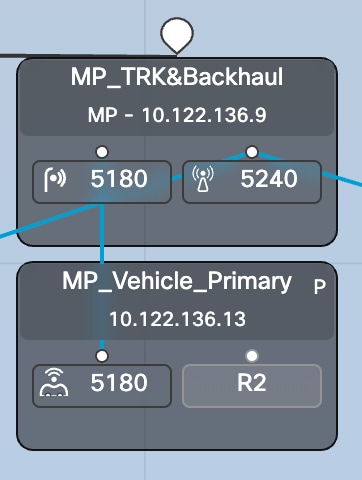
3つのトラック側無線(10.122.136.9、10.122.136.16、および10.122.136.15)があります。IPアドレスが10.122.136.9の無線回線側は、コアネットワークインフラストラクチャに有線接続されます。この中心無線は、バックホールリンクをIP 10.122.136.15および10.122.136.16のトレーラ無線のペアにまで拡張します。これらの固定インフラストラクチャバックホールリンクは、5240 MHzの周波数帯域で動作しています。3つの無線は、合計して、IPアドレスが10.122.136.13の5180 MHzの周波数で動作するモバイル車両にワイヤレスカバレッジを提供します。
この移動車両には、プライマリとしてIPアドレス10.122.136.13、セカンダリとしてIPアドレス10.122.136.14の2つの無線が装備されています。両方の無線が単一のスイッチを介して相互接続されます。セカンダリ無線は表示されません。
メッシュ終了フェールオーバー
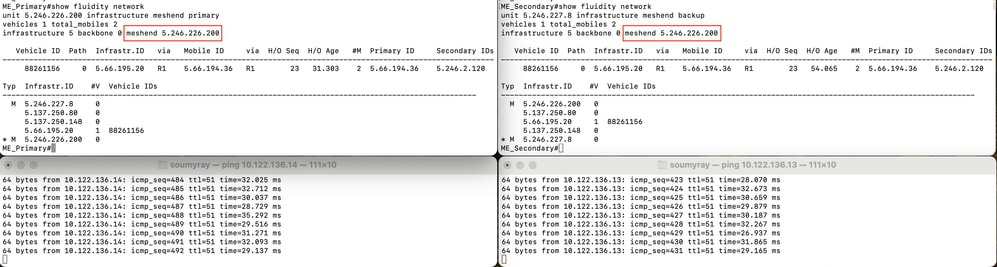
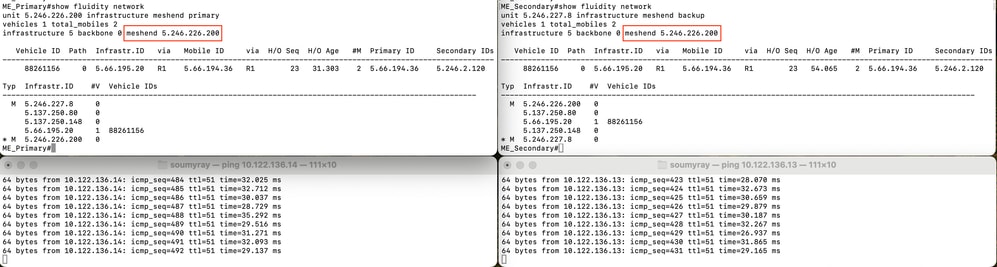
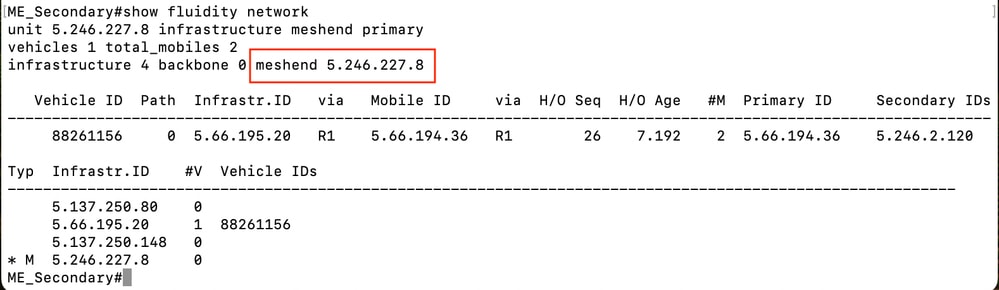
ステップ1:プライマリメッシュとセカンダリメッシュの両端がネットワークに接続され、アクティブになります。メッシュIDの低い無線がメッシュの終端として機能していることがわかります。
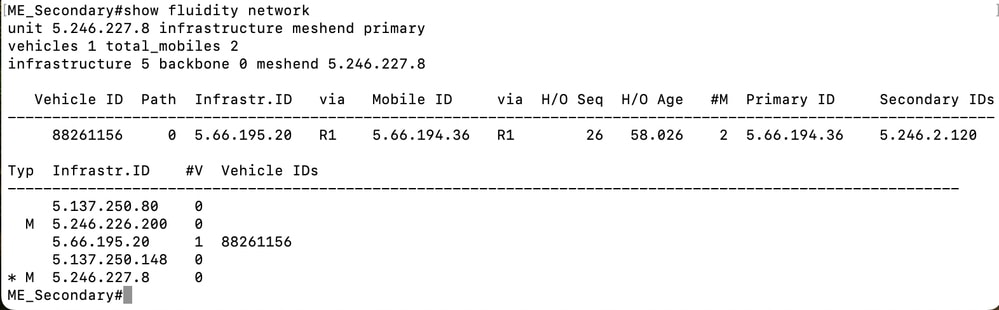
ステップ2:プライマリが処理を行うと、セカンダリメッシュエンドが引き継ぎ、ネットワーク全体のメッシュエンドとして機能します。障害が発生したプライマリメッシュの終端がインフラストラクチャ無線のリストから欠落していることに注意してください。
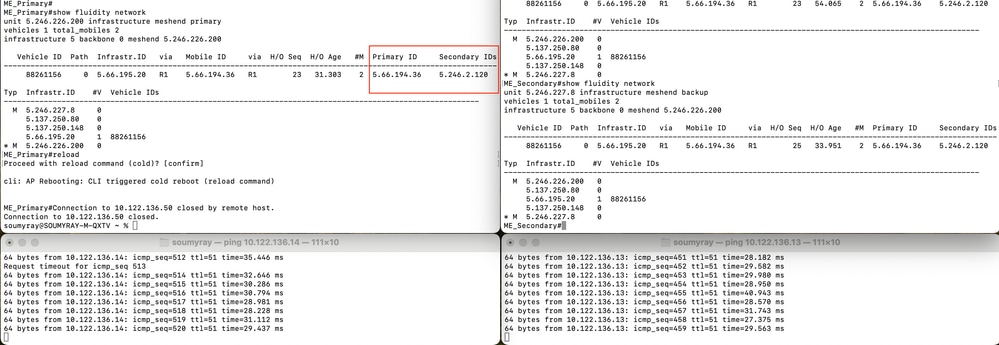
ステップ3:障害が発生したプライマリ無線が復旧し、動作するようになります。ただし、プリエンプション遅延がネットワークトポロジを学習するまで待機します
ステップ4:プリエンプションタイマーに達すると、メッシュID 5.246.226.200がプライマリの役割を引き継ぎ、メッシュID 5.246.227.8の無線が再びセカンダリになります。
車両無線のフェールオーバーのテスト
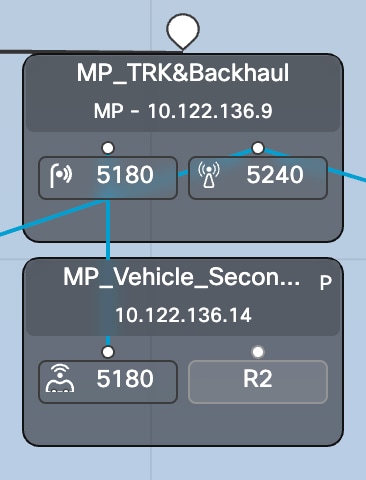
このラボネットワークでは、1台の車両をトラックサイドに接続した流動性の高いネットワークを構築しています。車両には、IP 10.122.136.13(メッシュID 5.66.194.36(P))と10.122.136.14(メッシュID 5.246.2.120(S))の2つの無線があります。
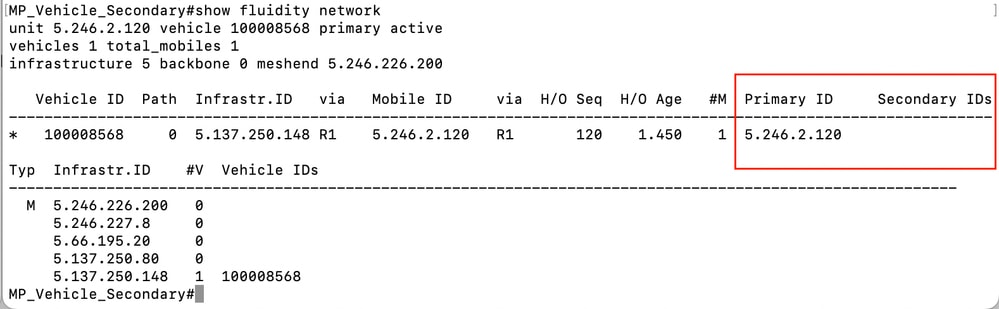
ステップ1:プライマリとセカンダリの両方の車両の無線がオンラインになります。低いメッシュIDを持つ無線がプライマリ無線として機能し、もう一方がセカンダリ無線として機能していることがわかります。無線品質に基づいて、プライマリ無線とセカンダリ無線の両方がトラックサイド無線と通信できます。しかし、オンボードネットワークへのダウンストリーム通信はすべて、常にプライマリ無線を経由します。TITANを使用すると、二次車両の無線は500ミリ秒以内の障害時にプライマリになります。
このスクリーンショットでは、メッシュ端から車両の無線までのMPLSトンネルを確認できます。

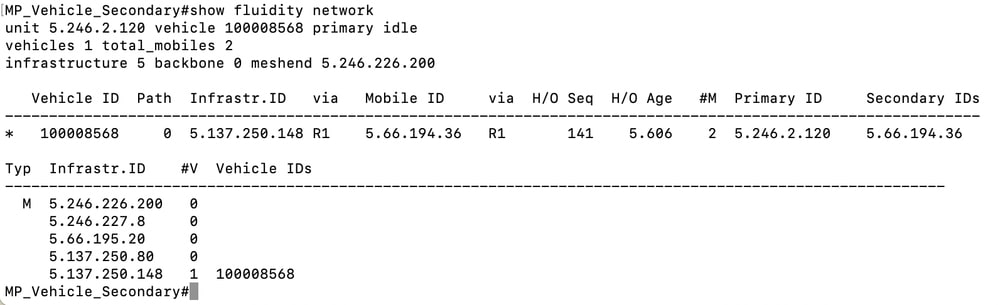
ステップ2:プライマリradio10.122.136.13をシャットダウンすると、セカンダリにフェールオーバーし、10.122.136.14がプライマリになります。
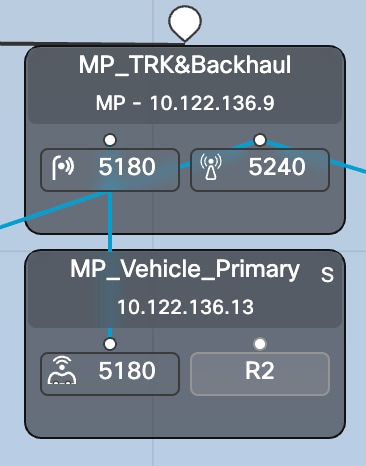
ステップ3:故障したプライマリオンボード無線の電源が再投入され、動作しています。ただし、この無線はネットワークに接続しますが、プリエンプションの遅延を待ち、流動性ネットワークに積極的に参加しません。
このスクリーンショットに示されているように、5.66.194.36はオンラインに戻りましたが、プリエンプション遅延中にセカンダリとして機能し、5.246.2.120は引き続き通信を管理しています。MPLSトンネルは、5.246.2.120が追跡側無線と通信していることも示しています。

TITANのトラブルシューティング
- TITANの設定時には、必要なすべての無線ですべての設定を同じにする必要があります。
- 導入の規模によっては、プリエンプション遅延を増やす必要があります。これは、故障したユニットが動作可能になった時点で、トポロジを学習する前にあまり早く役割を引き継がないようにするためです。
- 短すぎるファーストフェールタイムアウトを設定すると、ネットワークが不安定になる可能性があります。値150ミリ秒は、ほとんどの導入環境で使用できます。
 フィードバック
フィードバック